Si es posible efectuar una traslación, también debe ser posible llevar a cabo una rotación. El principal problema que enfrentamos es que, a diferencia de las traslaciones sobre tres ejes coordenados (que supondremos como coordenadas Cartesianas rectangulares), en donde el orden de las traslaciones es conmutativo, las rotaciones no son conmutativas. En el caso de las traslaciones, un movimiento de 3 unidades hacia la derecha seguido de otro movimiento de 8 unidades hacia arriba nos lleva al mismo lugar que si efectuáramos primero un desplazamiento de 8 unidades hacia arriba seguido de una traslación de 3 unidades hacia la derecha. Esto es conmutatividad pura. Pero tratándose de rotaciones, basta ver la siguiente figura para darnos cuenta de que el “orden de los factores” (o mejor dicho, las rotaciones) sí altera “el producto” (o mejor dicho, la posición final):

En la figura de arriba, se toma primero el eje-z usándolo para girar el marco de coordenadas Cartesianas en sentido contrario a las manecillas del reloj (visto desde arriba), imprimiendo una rotación al sistema de coordenadas rectangulares Cartesianas (x,y,z) a través de un ángulo θ1 manteniendo el eje-z en su lugar. Tras esto, tomamos el eje-x (en su nueva posición) para girar el sistema de coordenadas Cartesianas cambiando la posición del eje-z en un ángulo θ2. La posición del marco de coordenadas Cartesianas es diferente del que habríamos obtenido usando primero el eje-x para imprimir un giro de un ángulo θ2 y posteriormente usando el eje-z para imprimir un giro de un ángulo θ1. Esto mismo lo podemos comprobar de modo más evidente con el simple hecho de tomar un libro en nuestras manos imprimiendo una rotación de 90 grados con respecto a la portada del libro y otra rotación de 90 grados con respecto a otra referente, repitiendo el experimento pero invirtiendo el orden de las operaciones.
Antes de poder definir una matriz de rotación que nos pueda ser útil dentro de la Mecánica Matricial para imprimirle rotaciones a los objetos matriciales propios de la Mecánica Matricial, tenemos que repasar primero los resultados que nos son ya conocidos en la mecánica clásica, con la esperanza de poder extender lo que ya se sabe al territorio de la Mecánica Cuántica.
La rotación más sencilla es aquella mediante la cual tomamos un vector situado en el plano x-y girándolo en sentido contrario a las manecillas del reloj, lo cual equivale a tomar un eje-z (no visible) perpendicular al plano dándole un giro por un ángulo θ, moviendo el vector v0 a su nueva posición v’:

En todo momento, la longitud del objeto que es rotado debe permanecer inalterada, no le permitimos a la operación de rotación “estirar” o “comprimir” al objeto.
Procediendo de igual manera, para cada plano podemos definir una rotación diferente:

Si trabajamos confinados a un solo plano, por ejemplo el plano x-y, entonces nos basta con la siguiente matriz de rotación 2x2:

Esta matriz de rotación, aplicada como un operador a un vector v, nos produce un vector v’ cuya longitud es la misma que la del vector original, aunque las proyecciones verticales y horizontales hayan cambiado:
v’ = Rzv
Para un rotación de 60 grados, por ejemplo, la matriz de rotación será igual a:

De este modo, si las componentes horizontal y vertical del vector original v son a=3 y b=1, sus nuevas componentes a’ y b’ después de la rotación serán:
a’ = (0.5) a - (0.86) b = 1.5 - .86 = 0.64
b’ = (0.86) a + (0.5) b = 2.58 + 0.5 = 3.08
b’ = (0.86) a + (0.5) b = 2.58 + 0.5 = 3.08
Sin embargo, si lo que vamos a describir son rotaciones en un sistema de coordenadas tridimensional, entonces no nos basta con una sola matriz 2x2; necesitamos tres matrices 3x3, las cuales serán (el ángulo θ puede ser y será de hecho diferente en cada matriz):
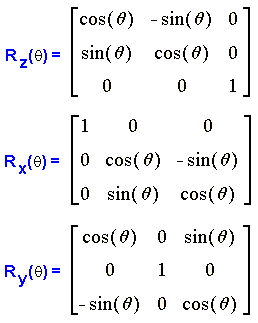
La primera matriz nos dá una rotación alrededor del eje-z, la segunda matriz nos dá una rotación alrededor del eje-x, y la tercera matriz nos dá una rotación alrededor del eje-y. Las rotaciones indicadas por estas tres matrices son rotaciones válidas para cualquier ángulo, independientemente de su magnitud.
Ahora trataremos de “tranportar” lo que hemos visto a las rotaciones propias de la Mecánica Matricial. Procederemos con cautela empezando con rotaciones infinitesimales, entendiéndose por “infinitesimal” no una cantidad típica del cálculo diferencial como dx a la cual no es posible asignarle un número, sino por una cantidad lo suficientemente pequeña como para que sea posible asignarle un número lo suficientemente pequeño como para permitirnos ignorar los términos de orden superior que aparezcan en las series de Taylor que sean utilizadas, y en este caso las series a las que nos estamos refiriendo son las series que corresponden a las funciones trigonométricas seno y coseno:

Para valores “infinitesimales” de la variable independiente, o mejor dicho para valores lo suficientemente pequeños que nos permitan despreciar los términos de orden superior en las series sin incurrir en márgenes apreciables de error, podemos tomar lo anterior como:

Esto nos permite escribir las tres matrices de rotación de la manera siguiente:

Si en cualquiera de las tres matrices hacemos ε = 0, podemos ver que el elemento identidad para rotaciones será igual a la matriz identidad:
Rx(0) = Ry(0) = Rz(0) = I
Llevaremos a cabo ahora una operación compuesta con dos de estas matrices, la operación RxRy, la cual equivale a una rotación alrededor del eje-y seguida de una rotación alrededor del eje-x (el orden de las rotaciones debe leerse de derecha izquierda) que por multiplicación matricial directa podemos ver que es igual a:

Por otro lado, la operación RxRy, la cual equivale a una rotación alrededor del eje-y seguida de una rotación alrededor del eje-x es igual a:

Si comparamos ambos productos matriciales, podemos ver que las rotaciones infinitesimales en torno a ejes de rotación diferentes conmutan si ignoramos los términos de orden ε².
Es importante destacar que lo que hemos hecho hasta aquí no tiene absolutamente nada que ver con la Mecánica Cuántica; no hemos utilizado conceptos propios de la Mecánica Cuántica. Cada matriz R es una matriz ortogonal que actúa sobre un vector columna v. Se trata de resultados clásicos que ahora trataremos de extender hacia la Mecánica Matricial.
Empezaremos por tomar a la matriz Rz descomponiéndola en una suma de matrices en función de los términos del parámetro ε. En base a esto, tenemos lo siguiente:

Observando que la matriz que corresponde al tercer término se puede obtener elevando al cuadrado la matriz que corresponde al segundo término, podemos representar lo anterior de una manera más compacta como:
I - iεMz - (ε²/2) Mz²
en donde:

de este modo, una rotación pequeña alrededor del eje-z se puede describir mediante esta matriz de la manera señalada arriba. Esta matriz no debe ser confundida en ningún momento con cualquiera de las matrices que representan cantidades físicas.
Tomaremos ahora a la matriz Rx descomponiéndola también en una suma de matrices en función de los términos del parámetro ε. En base a esto, tenemos lo siguiente:

Al igual que en el caso anterior, observando que la matriz que corresponde al tercer término se puede obtener elevando al cuadrado la matriz que corresponde al segundo término, podemos representar lo anterior de una manera más compacta como:
I - iεMx - (ε²/2) Mx²
en donde:

Por último, tomaremos a la matriz Ry descomponiéndola en una suma de matrices en función de los términos del parámetro ε. En base a esto, tenemos lo siguiente:

Como en los dos casos anteriores, observando que la matriz que corresponde al tercer término se puede obtener elevando al cuadrado la matriz que corresponde al segundo término, podemos representar lo anterior de una manera más compacta como:
I - iεMy - (ε²/2) My²
en donde:

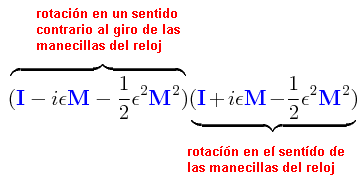
En cada uno de los casos que hemos considerado, el cambio de ε a -ε producirá una rotación inversa, en sentido contrario al sentido de la rotación original, descrito por la matriz:
I + iεM - (ε²/2) M²
Puesto de otra manera:

lo cual nos dá:
I + ε²M² - (1/2) ε²M² - (1/2) ε²M² = I
Del mismo modo:
también nos produce un giro en un sentido que es cancelado por un giro de igual magnitud aplicado en el sentido opuesto.
A continuación, evaluaremos el producto matricial MxMy:

Por otro lado, el producto matricial MyMx será:

Obviamente, el producto matricial MxMy es diferente del producto matricial MyMx. Veamos a continuación cuál es esa diferencia:

Podemos compactar esto un poco recurriendo a la notación del conmutador:
[Mx, My] = iMz
Procediendo del mismo modo, obtenemos también:
[Mx, My] = iMz
[My, Mz] = iMx
[Mz, Mx] = iMy
[My, Mz] = iMx
[Mz, Mx] = iMy
Esto parece ya familiar. Y debe serlo, cuando hacemos las siguientes substituciones:
Mx → Lx___My → Ly___Mz → Lz
Estas son esencialmente las relaciones de conmutación para el momento angular. Puesto que estamos utilizando las matrices M como generadoras de las matrices de rotación que estamos buscando, esto sólo puede significar una cosa: el momento angular es el generador de las matrices de rotación, al igual que en la mecánica clásica el momento angular es el generador de rotaciones.
Aquí puede surgir cierta desconfianza porque las matrices con las cuales empezamos, Rx, Ry y Rz, son las matrices clásicas para llevar a cabo la rotación de un objeto sólido en el espacio tridimensional Euclideano y ciertamente no de una matriz. Esto se puede solventar tomando una matriz A, la cual supondremos que puede ser de cualquier dimensión (por ejemplo, una matriz 2x2), tomando como operador esencial para llevar a cabo una rotación infinitesimal alrededor del eje-z al siguiente operador matricial (la cantidad infinitesimal ε usada arriba será simbolizada ahora como un ángulo pequeño φ expresado en radianes, con el fin de destacar el hecho de que el desarrollo lo estaremos llevando a cabo ahora de modo que la rotación actúe sobre los objetos propios de la Mecánica Cuántica):
U = I - iφJz
haciendo también:
U-1 = I + iφJz
con lo cual, despreciando el término que contiene a φ²:
U-1·U = (I + iφJz)(I - iφJz) ≈ I
y del mismo modo:
U·U-1 = (I - iφJz)(I + iφJz) ≈ I
justificando así el considerar a U-1 como el inverso de U.
Usando estos operadores infinitesimales de rotación aplicándolos sobre una matriz A para producir una matriz rotada A’, tenemos lo siguiente:
U-1AU = (I + iφJz)A(I - iφJz) = A’
Llevando a cabo el doble producto matricial y despreciando el término que contiene a φ², se tiene entonces:
U-1AU = A - iφ(AJz - JzA)
En el caso de la rotación identidad, φ es igual a cero de modo tal que U es igual a I y las matrices A que representan cantidades físicas permanecen iguales. Para rotaciones pequeñas en las cuales φ es un ángulo pequeño pero no igual a cero, el cambio en la matriz A que representa una cantidad física es proporcional al ángulo φ, el cambio es proporcional a la rotación imprimida.
Podemos hacer más preciso el efecto de la rotación infinitesimal tomando en cuenta términos que incluyan a φ², definiendo lo siguiente:
U = I - iφJz - [φ²/2]K
siendo K cualquier matriz que necesitemos en la siguiente aproximación en donde se requiera conservar los términos en φ y φ² pero pudiéndose despreciar los términos en φ3 y φ4. La rotación inversa se obtiene cambiando en lo anterior de φ a -φ:
U-1 = I + iφJz - [φ²/2]K
Despreciando los términos en φ3 y φ4, esto significa que:
U-1·U =_______________________
(I + iφJz - [φ²/2]K)·( I - iφJz - [φ²/2]K) = I
(I + iφJz - [φ²/2]K)·( I - iφJz - [φ²/2]K) = I
Desarrollando el producto matricial:
I + φ²Jz² - [φ²/2]K - [φ²/2]K = I
φ²Jz² - φ²K = O
K = Jz
φ²Jz² - φ²K = O
K = Jz
Hemos encontrado el valor que debe tener la matriz K, con lo cual:
U = I - iφJz - [φ²/2]Jz
U-1 = I + iφJz - [φ²/2]Jz
U-1 = I + iφJz - [φ²/2]Jz
Del mismo modo, puesto que la designación simbólica de las coordenadas rectangulares Cartesianas es arbitraria, debe de haber matrices Jx y Jy tales que para cualquier valor pequeño de φ:
I - iφJx - [φ²/2]Jx
I + iφJy - [φ²/2]Jy
y:
I + iφJy - [φ²/2]Jy
correspondan a rotaciones pequeñas alrededor del eje-x y del eje-z. Los productos de estas matrices para rotaciones alrededor del eje-x, del eje-y y del eje-z corresponderán a los productos de las rotaciones. Para cualquiera de estas rotaciones, una matriz A que represente una cantidad física será cambiada a una cantidad A’ = U-1AU, siendo U la matriz que corresponda a la rotación llevada a cabo.
A continuación, formaremos el siguiente producto matricial cuádruple involucrando rotaciones sucesivas alrededor de dos ejes distintos (para apreciar la razón del por qué el orden a ser seguido no es U-12U-11U1U2 es necesario aplicar los operadores sobre un vector columna X y desarrollar en pleno):
U-12 U-11 U2 U1 =____________
(I + iφJy - [φ²/2]Jy)(I + iφJx - [φ²/2]Jx)
×(I - iφJy - [φ²/2]Jy)(I + iφJx - [φ²/2]Jx)
(I + iφJy - [φ²/2]Jy)(I + iφJx - [φ²/2]Jx)
×(I - iφJy - [φ²/2]Jy)(I + iφJx - [φ²/2]Jx)
Desarrollando el producto matricial:
I + iφJy + iφJx - iφJy - iφJx
+ iφJy(-iφJy) - [φ²/2]Jy² - [φ²/2]Jy²
+ iφJx(-iφJx) - [φ²/2]Jx² - [φ²/2]Jx² + iφJyiφJx
+ iφJy(-iφJx) + iφJx(-iφJy) - iφJy(-iφJx)
+ iφJy(-iφJy) - [φ²/2]Jy² - [φ²/2]Jy²
+ iφJx(-iφJx) - [φ²/2]Jx² - [φ²/2]Jx² + iφJyiφJx
+ iφJy(-iφJx) + iφJx(-iφJy) - iφJy(-iφJx)
Esto se simplifica a lo siguiente:
I + φ²(JxJy - JyJx)
Si estuviéramos limitados a manejar ángulos infinitesimales, lo que hemos hecho no nos serviría de mucho, ya que estamos interesados en ángulos finitos que podamos medir de alguna manera o con los cuales podamos hacer cálculos numéricos. Al igual que como ocurrió cuando obtuvimos el operador matricial eiaP/ħ necesario para producir una traslación finita usando a la matriz momentum P como generadora de la traslación, aquí podemos obtener una rotación finita llevando a cabo una rotación infinitesimal tras otra, acumulando una composición de rotaciones infinitesimales.
(I+ [iφ/3]Mx)(···)(I+ [iφ/3]Mx)A(I-[iφ/3]Mx)(···)(I-[iφ/3]Mx)
que viene siendo lo mismo que:
(I + [iφ/3]Mx)3A(I - [iφ/3]Mx)3
Esto lo podemos generalizar de la siguiente manera:
(I + [iφ/n]Mx) n A (I - [iφ/n]Mx) n
para cualquier valor del exponente n.
Puesto que dos rotaciones sucesivas, una tras otra, en el mismo plano, (por ejemplo, alrededor del eje-z) son aditivas (una rotación de 45° seguida de una rotación de 20° es igual a una rotación de 65°):
Rz(φ1) Rz(φ2) = Rz(φ1 + φ2)
esperamos entonces que la multiplicación de dos matrices de rotación sea igual a la suma de sus argumentos, lo cual nos sugiere que busquemos una representación exponencial de nuestros operadores rotacionales, para poder así cumplir con la propiedad aditiva:

Tal y como ocurrió en nuestra búsqueda del operador de traslación, si tomamos el valor límite del proceso de composición de rotaciones infinitesimales para cualquiera de las matrices Mx, My y Mz:
(I + [iφ/n]M) n A (I - [iφ/n]M) n
haciendo n→∞ con el objeto de acumularlas hacia una rotación finita, llegaremos entonces a la definición de nuestro operador de rotación como una función exponencial matricial:

Así pues, cada uno de nuestros operadores de rotación será una función matricial exponencial.
¿Y qué aspecto tendrán los operadores de rotación ya desarrollados para cada caso en particular? Ello depende del tipo de momento angular del que estemos hablando. Tratándose del momento angular orbital J, se tiene, metiendo dentro del panorama a la constante física ħ:
Jx = ħLx___Jy = ħLy___Jz = ħLz
Entonces, para el momento angular orbital:

Estos son los valores matriciales que debemos darle a cada una de las matrices M para obtener los operadores de rotación que corresponden al momento angular orbital para una rotación finita a lo largo de un ángulo φ. De este modo, los operadores de rotación serán:

Naturalmente, de las relaciones de conmutación obtenidas arriba para las matrices M generadoras de rotación, podemos recuperar las relaciones de conmutación para el momento angular orbital J, empezando por la primera:
[Mx, My] = iMz
que viene siendo:

siendo las otras dos relaciones de conmutación para el momento angular orbital:
[Jy, Jz] = iħJx
[Jz, Jx] = iħJy
[Jz, Jx] = iħJy
Ahora bien, tratándose del momento angular del spin, cuando hacemos las siguientes substituciones:
Mx → σx/2
_My → σy/2
_Mz → σz/2
_My → σy/2
_Mz → σz/2
empleando las matrices de Pauli:

obtendremos a partir de las relaciones de conmutación para las matrices M de arriba las relaciones familiares de conmutación para las matrices de Pauli. Por lo tanto, tratándose del momento angular del spin S (metiendo dentro del panorama a la constante física ħ), en donde se tiene a los componentes del momento angular del spin S en función de las matrices de Pauli:
Sx = (ħ/2)σx___Sy = (ħ/2)σy___Sz = (ħ/2)σz
se tendrán entonces los siguientes operadores de rotación para el momento angular del spin:

PROBLEMA: (1) Constrúyase una matriz de transformación T que tenga como vectores columna a los eigenvectores normalizados de la matriz Sx, haciéndolo de tal manera que los elementos puestos a lo largo de la diagonal principal sean positivos reales. (2) Demuéstrese que la matriz T es una matriz unitaria que transforma a la matriz Sx haciéndola diagonal. (3) Demuéstrese que la matriz T también puede ser construída como uno de los operadores de rotación:

(4) ¿Cuál es el significado de esta transformación, desde el punto de vista de una rotación en el espacio tridimensional real? (5) ¿Cuál es el significado de esta transformación, desde el punto de vista de una rotación en el espacio complejo de dos dimensiones?
(1) Para obtener los eigenvectores de la matriz Sx, montamos la ecuación característica haciéndola actuar sobre un vector v:
Sxv = λv
De este modo, tenemos la siguiente ecuación matricial:

Llevando a cabo la multiplicación matricial del lado izquierdo y pasando el lado derecho hacia la izquierda, tenemos entonces:

Esto nos dá el siguiente par de ecuaciones simultáneas:

Podemos resolver este sistema de ecuaciones despejando para en la segunda ecuación:

Substituyendo esto en la primera ecuación, podemos obtener los eigenvalores λ para este sistema:

Tenemos pues dos eigenvalores. Usando el eigenvalor positivo de λ en la segunda ecuación, obtenemos la condición general x1 = x2 que podemos satisfacer dándole a ambos el valor de 1 para así poder construír el primer eigenvector columna v1 que finalmente podemos normalizar para que sea de longitud unidad:

Utilizando el eigenvalor negativo de λ, podemos obtener el segundo eigenvector columna v1 que también podemos normalizar:

Con los dos eigenvectores columna normalizados que hemos obtenido, podemos construír finalmente la matriz de transformación T deseada:

Obsérvese que se ha construído la matriz T de modo tal que los elementos a lo largo de la diagonal principal sean positivos reales.
(2) Para demostrar que la matriz T es unitaria, obtenemos primero el inverso T-1 de la matriz:

Es obvio que la matriz inversa T-1 es también la transpuesta T* de la matriz T. Puesto que la transpuesta de la matriz T es también igual a su inversa, o sea T* = T-1, se concluye entonces que la matriz T es unitaria. Para demostrar que transforma Sx a una forma diagonal, llevamos a cabo el triple producto matricial T-1SxT, con lo cual obtenemos una matriz diagonal que resulta ser la matriz Sz:
(3) Para demostrar que la matriz T también puede ser construída como uno de los operadores de rotación señalados a partir de la matriz Sy, usando el hecho fácilmente verificable de que:

llevaremos a cabo el siguiente desarrollo exponencial por series de Maclaurin aplicadas al caso matricial:

Podemos reconocer los términos real e imaginario, puestos entre paréntesis, como las expansiones en serie de Maclaurin para las funciones cosenoidal y senoidal, permitiéndonos reducir todo a:

Esta es la misma matriz T que la que habíamos obtenido previamente, pero obtenida ahora a partir de un operador matricial de rotación desarrollado y simplificado como una función matricial exponencial.
(4) El significado de una transformación de este tipo, visto desde el punto de vista de una rotación en el espacio tridimensional real y considerando al eje-z como fijo, se puede apreciar tomando la matriz de rotación clásica en el plano x-y dándole al ángulo de rotación un valor de θ = π/4, con lo cual obtenemos a la matriz que puede tomar cualquier vector v en el plano x-y girándolo en sentido contrario de las manecillas del reloj en un ángulo de 45 grados:

(5) Desde el punto de vista de una rotación llevada a cabo en el espacio complejo de dos dimensiones, la matriz T es la matriz que puede tomar ya sea a la matriz Sx ó a la matriz Sz imprimiéndole un giro de 90 grados para transformarla en una matriz Sz ó en una matriz Sx.